
Nous évoquerons dans cet article les modes de calcul d’un astigmatisme induit chirurgicalement.
Mesure de l’astigmatisme induit par analyse vectorielle
À l’heure où la chirurgie de la cataracte se veut « phacoréfractive », il importe de quantifier avec précision l’astigmatisme cornéen chirurgical induit (ou SIA pour Surgically Induced Astigmatism) ; cette quantification repose sur une différence vectorielle (Form. 1).
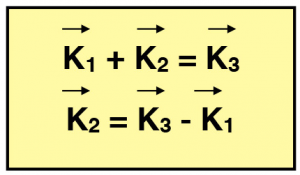
Formule 1 – Si K1 est le vecteur de l’astigmatisme préopératoire et K3 le vecteur de l’astigmatisme postopératoire, l’astigmatisme induit chirurgicalement K2 s’exprime comme la différence vectorielle de K3 – K1 .
Il existe trois méthodes classiques d’analyse vectorielle du SIA, à l’origine de diverses méthodes dérivées utilisées dans les études (Holladay, Alpins, Naeser, Cravy, etc) :
1- la méthode graphique,
2- la méthode des coordonnées polaires,
3- la méthode des sinus et des cosinus.
La méthode graphique
Elle consiste à reporter sur un graphe les vecteurs K1 et K3 dont les longueurs respectives sont égales aux magnitudes des astigmatismes pré- et postopératoire, et dont les angles respectifs α et γ sont égaux au double des angles des astigmatismes pré- et postopératoire (ce doublement permettant de passer d’une valeur d’astigmatisme exprimée entre 0 et 180° à un repère sur 360°). L’astigmatisme induit K2 peut alors être tracé comme la différence entre K3 et K1, dont la longueur et l’angle (à diviser par deux) peuvent alors être mesurés à la règle et au rapporteur. C’est la méthode la plus simple ; c’est également la moins précise (Fig. 1-4).
La lecture de cet article est réservée aux abonnés.
Pour accéder à l'article complet
Découvrez nos offres d'abonnement
Abonnez-vous à la revue et accédez à tous les contenus du site !
- Tous les contenus de la revue en illimité
- Les numéros papier sur l'année
- Les newsletters mensuelles
- Les archives numériques en ligne
ou
Inscrivez-vous gratuitement sur Mon Œil.fr et bénéficiez de l'accès à de nombreuses catégories du site !
- Accès aux catégories d'articles exclusives
- Les newsletters mensuelles
- Votre historique de commandes en ligne